Robotic gripper senses ripeness and harvests fruit without bruising
Read more about how the Cornell-designed soft robotic gripper uses touch sensing to identify ripeness at harvest.
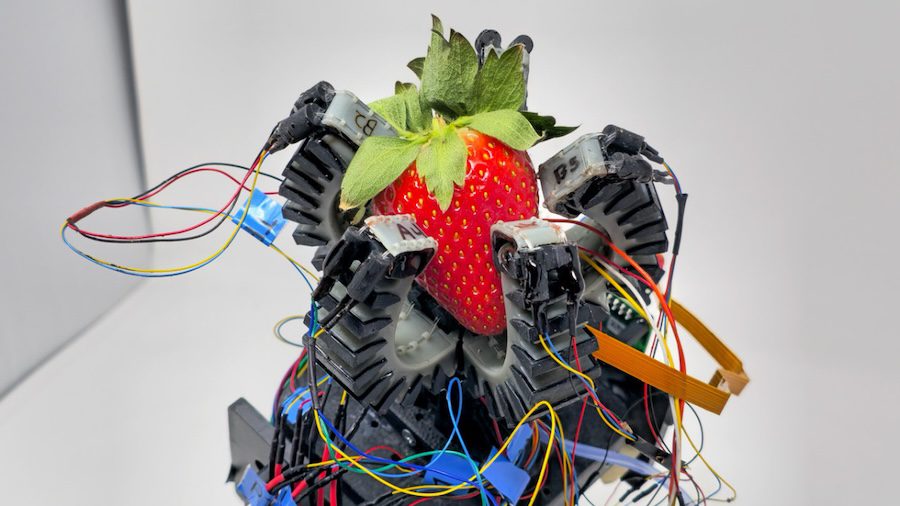
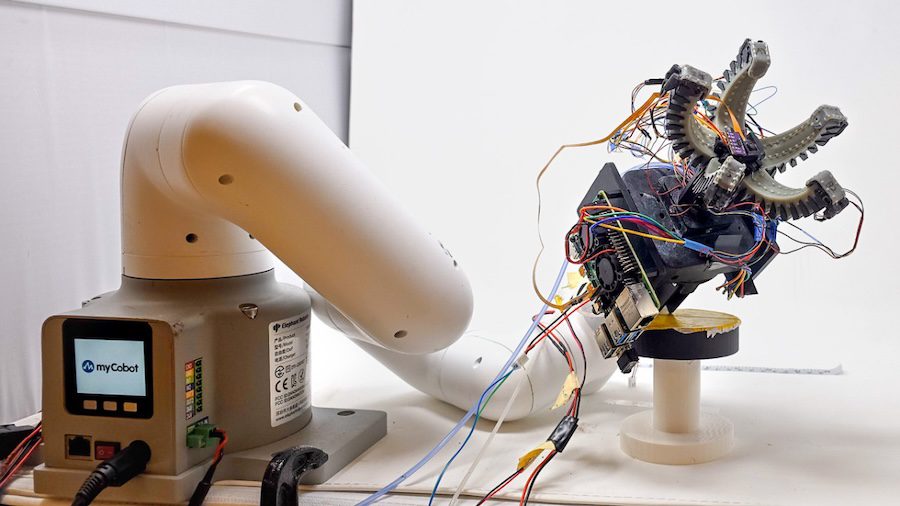
Researchers at Cornell University have developed a soft robotic gripper that can determine fruit ripeness by touch and harvest delicate crops without causing damage, writes David Nutt with the Cornell Chronicle.
The device uses stretchable fiber-optic sensors embedded in flexible “fingers” to measure both pressure and curvature, allowing it to assess firmness (a key indicator of ripeness) and adjust its grip pressure. In testing, the system successfully identified when strawberries were ready to pick and gently removed them without bruising.
Unlike conventional robotic harvesters that pull fruit, the Cornell design incorporates a twisting motion that mimics how humans pick berries, reducing strain on trees while preserving fruit quality.
RELATED – USDA, MSU develop dual-arm fruit picking robot to drive harvest efficiency
The technology was developed in the lab of Rob Shepherd, professor of mechanical engineering, in collaboration with horticulture researcher Marvin Pritts. The work was published in Nature Communications and led by former postdoctoral researcher Anand Mishra.
Researchers say the system could expand automation for fragile, high-value crops and enable more sustainable production systems, including diversified plantings that are difficult to manage with traditional machinery. It may also improve harvesting of fruits where ripeness is hard to detect visually, such as avocados or pawpaws.
Photos courtesy of Cornell Chronicle.